Master Thesis Results
Stereo face tracking system
As it was said before, these works are maid for Pedro Jiménez's PhD Thesis.
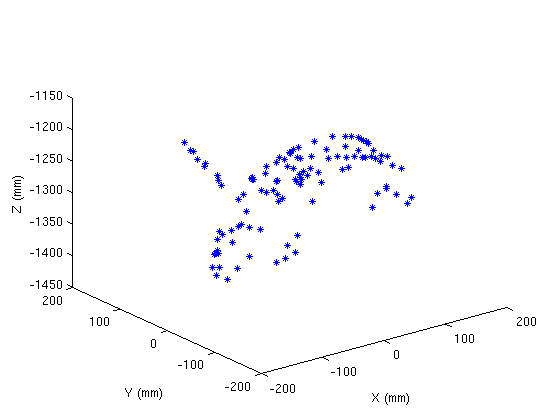
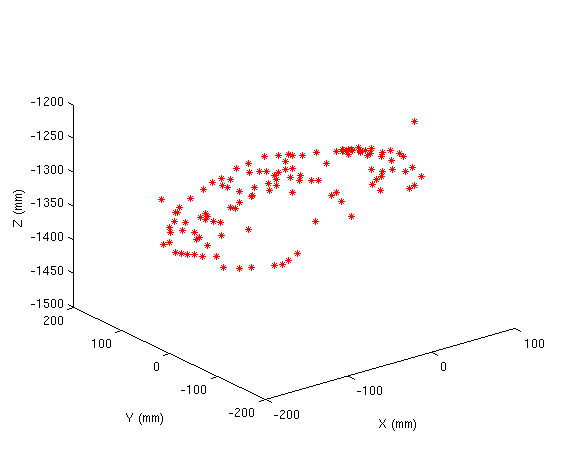
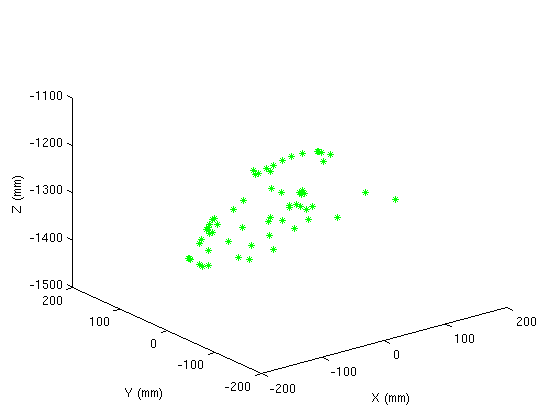
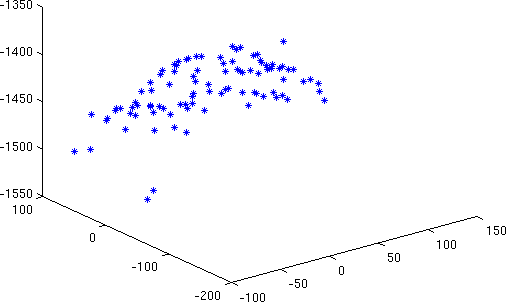
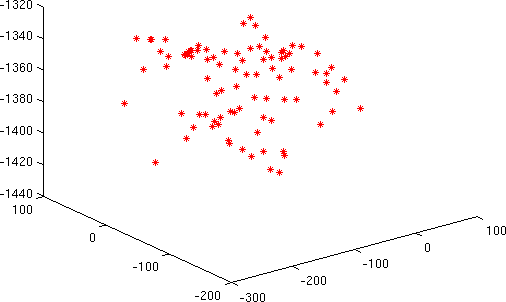
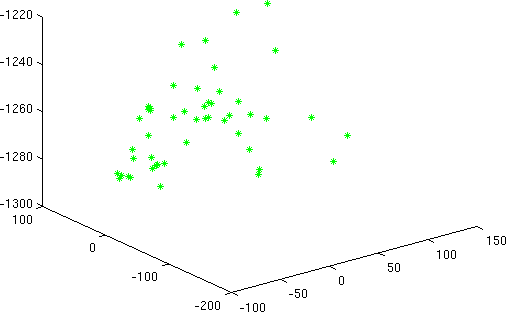
Briefly, the main system is based on a 3D tracking algorithm taking its input from a stereo system, which detects features inside a region of interest, and then, triangulate and track features to estimate the pose of the object. In this particular case, the objects are faces.
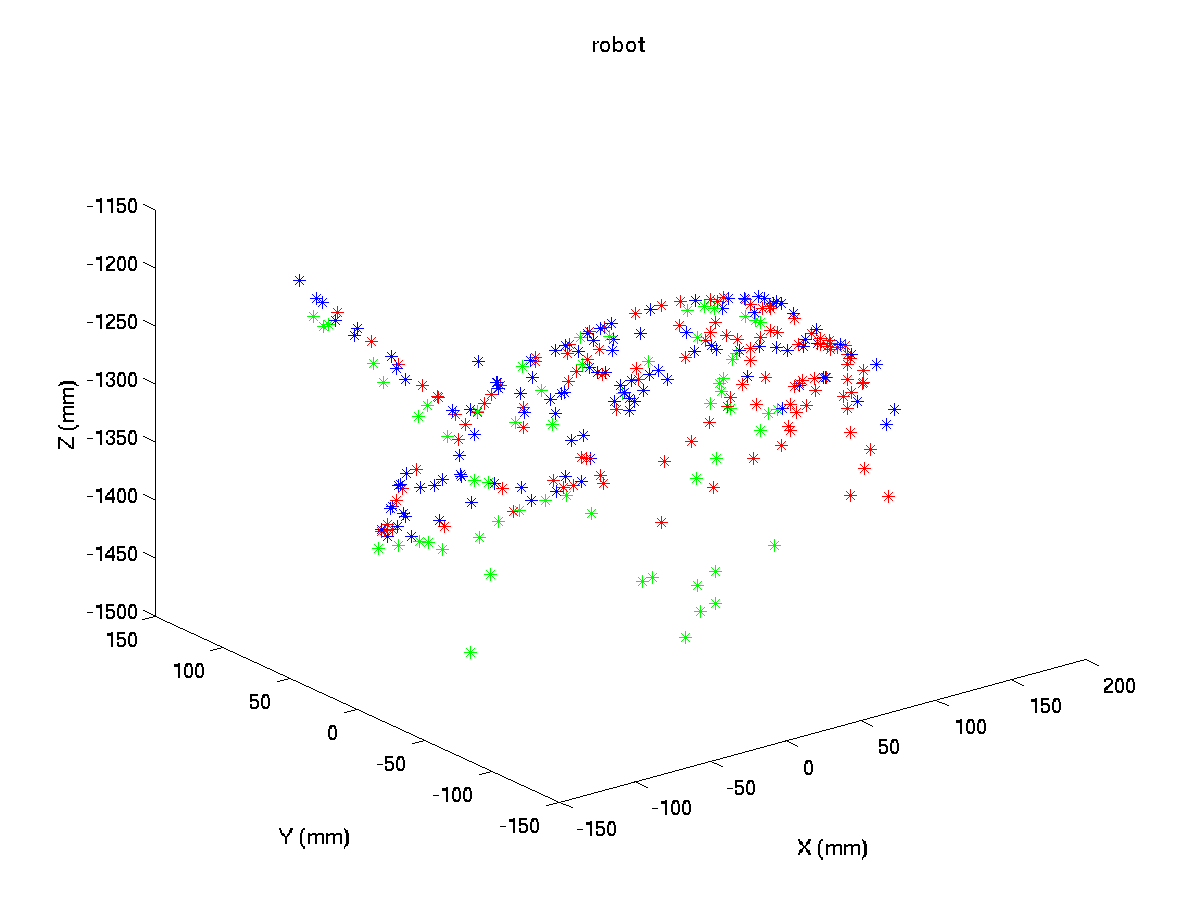
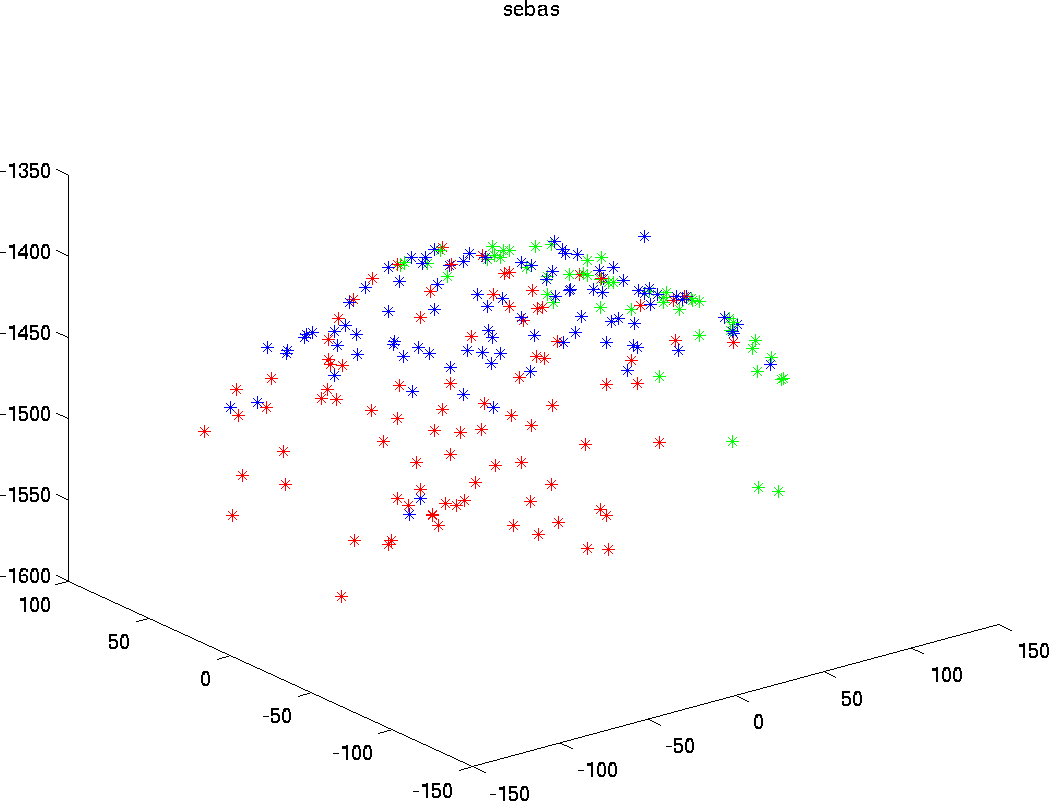
My main contribution to this system was to increase the number of points in the head model. The model used in this case was aquired from scan-laser and it was decimated to make the system works with the model. Some samples of the process followed to decimate the model are described in the section below.
Tu sum up, the increase of model points makes the system more robust against fast rotations. On the other hand, due to the high number of points, the estimation of the pose is a little bit worse because RANSAC has a fixed number of iterations, which is function of the number of points. Also the increase of model points makes the processing time too high, again, function of the points considered.